
 pour radios FrSky Taranis (OpenTX 2.2)")
")






Une fois n’est pas coutume, le rythme des sorties de Betaflight ralentit ces dernières semaines ! On ne va pas s’en plaindre, d’autant plus que les dernières versions (2.5.3 & 2.5.4) de BTFL sont bien stables, et très agréables à faire voler. Pour autant, cela n’empêche pas Boris de continuer à peaufiner ses versions et notamment les algorithmes de vols. Et c’est bien là la principale nouveauté de cette version 2.6.
Des sécurités en plus, des bugs en moins, des nouveautés…
 Comme à chaque mise à jour, des bugs ont été corrigés dans cette version, notamment lors de la réinjection d’un « long » dump (fichier de configuration de votre carte), celui-ci ne passait pas forcément en entier, cela a été corrigé dans cette version. Toujours concernant le CLI, on retiendra que la commande « dump » a évolué : on retrouve toujours le « dump » standard qui permet d’afficher la configuration du profil actif, et un « dump all » qui y ajoute la configuration de l’ensemble des profils.
Comme à chaque mise à jour, des bugs ont été corrigés dans cette version, notamment lors de la réinjection d’un « long » dump (fichier de configuration de votre carte), celui-ci ne passait pas forcément en entier, cela a été corrigé dans cette version. Toujours concernant le CLI, on retiendra que la commande « dump » a évolué : on retrouve toujours le « dump » standard qui permet d’afficher la configuration du profil actif, et un « dump all » qui y ajoute la configuration de l’ensemble des profils.
Une sécurité à l’allumage de la machine a par ailleurs été ajoutée, qui empêche d’armer tant que la calibration des gyro n’est pas terminée.
VCP, SimonK et Passthrough…
On trouve dans cette version un début d’implémentation du mode « Passthrough » (fonction qui permet de flasher ses ESC directement à travers la carte de vols) pour les ESC avec un bootloader SimonK, mais la fonctionnalité n’est pas encore tout à fait finalisée. Boris souhaitait sortir la 2.6.0 pour les gains de performances en vol, pas pour cette fonction, mais cela augure du bon pour ceux dont les ESC sont en Bootloader SimonK ! une version 2.6.1 est d’ailleurs déjà sur les rails pour poursuivre l’intégration de cette fonction.
 Les cartes de vols (comme la LUX de Lumenier, ou la SPF3Mini) sorties ces derniers mois utilisent majoritairement un port USB en mode « VCP ». Cela ne vous parle peut-être pas, jusqu’au moment où vous essaierez de flasher vos ESC via ce port USB : « Mince ça marche pas ! » En effet, jusqu’à cette version 2.6.0, cela ne fonctionnait pas, il fallait en général passer par le UART3 de ces cartes avec un convertisseur série/USB derrière (FTDI), ce qui était tout de suite moins pratique. Avec cette version 2.6, on va bientôt pouvoir ranger le FTDI et ressortir un simple câble USB !
Les cartes de vols (comme la LUX de Lumenier, ou la SPF3Mini) sorties ces derniers mois utilisent majoritairement un port USB en mode « VCP ». Cela ne vous parle peut-être pas, jusqu’au moment où vous essaierez de flasher vos ESC via ce port USB : « Mince ça marche pas ! » En effet, jusqu’à cette version 2.6.0, cela ne fonctionnait pas, il fallait en général passer par le UART3 de ces cartes avec un convertisseur série/USB derrière (FTDI), ce qui était tout de suite moins pratique. Avec cette version 2.6, on va bientôt pouvoir ranger le FTDI et ressortir un simple câble USB !
[ASTUCE] Si vous souhaitez tester le flashage de vos ESC via un port USB VCP, sachez qu’il vous faudra au minimum la version 14.4.0.4 de la BLHeli Suite (à l’heure où j’écris ces lignes, la dernière version en date est la 14.4.0.5.1). Cette version n’est pas encore disponible officiellement, mais on peut aller la chercher sur la page de téléchargement de BLHeli, ICI.
[CONSEIL] Pour autant, je vous conseille d’attendre la prochaine version de Betaflight (probablement en 2.6.1) et la diffusion officielle de l’application BLHeli pour avoir une version « finalisée », des corrections sont en effet en cours pour cette fonction.

Comportement en vol…
C’est LA nouveauté de cette version. On pourrait se dire « qu’est ce qui peut bien changer entre la 2.5 et la 2.6 ? », et c’était aussi mon sentiment avant de l’avoir testé en vol :
diablement précis autour des neutres des manches, très rapide en bout de course, avec une fluidité en vol entre les deux, voila mon ressenti après une journée de vol, à la fois en course et en freeride, avec cette version.
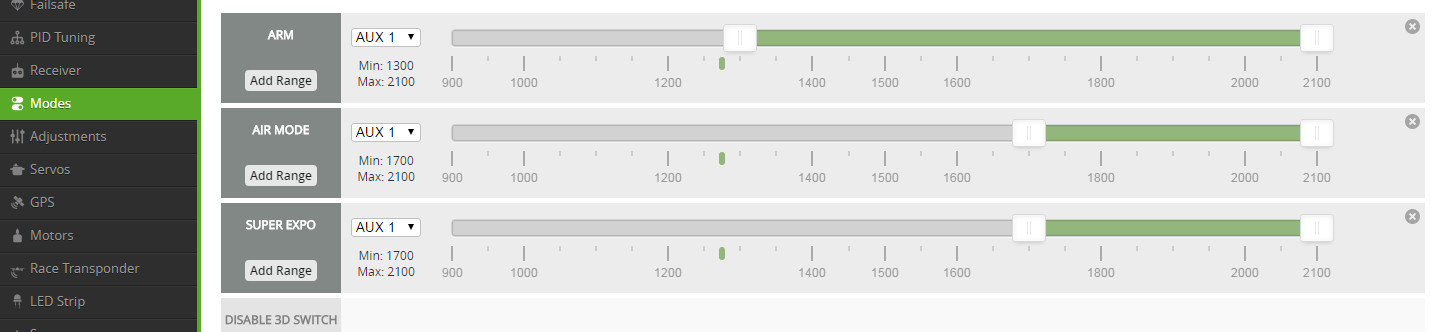
Dans cette version, le mode Accro+ disparait, au profit d’un nouveau mode de vol « SuperExpo« , disponible en REWRITE et LUXFLOAT. Ce mode de vol s’active (comme le AirMode, Angle, Horizon, etc…) dans l’onglet Modes de vols, via un inter (le même que l’inter d’armement pour ma part) :
 Il se paramètre ensuite à travers une variable disponible dans le CLI : « super_expo_factor » que j’ai mis pour ma part à 40 pour démarrer :
Il se paramètre ensuite à travers une variable disponible dans le CLI : « super_expo_factor » que j’ai mis pour ma part à 40 pour démarrer :
set super_expo_factor = 40
save
Si vous utilisez ce mode de vol « SuperExpo », il est conseillé de baisser vos rates (pitch et roll à minima), cela vous donnera la précision voulue autour des neutres, et via la fonction « Super Expo » la rapidité en bout de manche (pour faire des flips et des tonneaux notamment).
[ASTUCE] Avant d’utiliser ce mode « SuperExpo » j’étais à 0.70 de rates partout (pitch / roll / yaw), je les ai baissé à 0.60 pour pitch et roll et laissé à 0.70 pour le Yaw.
De la même manière, si vous utilisiez de l’expo sur votre radio, vous pourrez, après avoir activé ce mode super expo, diminuer grandement l’expo sur votre radio, voir aller jusqu’à la supprimer sur les voies PITCH et ROLL !
[ASTUCE] Sur les 3 machines testées ce week-end, pour 2 pilotes différents : sur l’une des machines, on a supprimé complètement l’expo, sur les deux autres on l’a divisé par deux pour laisser 15% d’expo.
Parmi les autres nouveautés qui contribuent à l’amélioration du comportement en vol, on notera le filtrage du bruit qui a été amélioré sur le YAW, ainsi que l’amélioration du « ITerm reset ». Plutôt que de longues explications, Boris B. a mis en ligne une vidéo montrant bien la différence, notamment sur les arrêts lorsque le multi sort d’un ordre donné sur le YAW :
Autre changement de cette version, le D du YAW a été supprimé pour tous les contrôleurs PID (REWRITE, MW23, LUXFLOAT), car d’une part il était peu utile à l’usage, et cela permet de gagner encore un peu sur les temps de calculs, donc ne cherchez plus à le régler !
Toujours concernant le YAW, utilisé en REWRITE, la valeur « rate » a été adaptée. Pour mieux coïncider avec les valeurs rentrées en PITCH et ROLL, la sensibilité du YAW a été accrue. Faites attention lorsque vous passerez à cette version, vous risquez de trouver le YAW plus sensible si vous ne changez par la valeur de rate.
[ASTUCE] Pour la valeur « Rate » sur l’axe YAW en REWRITE, une valeur anciennement à 100 correspond dans cette version à une valeur de 80.
Enfin, des changements ont été opérés sur le LUXFLOAT, sur la représentation des PID. En effet, tous les PID en LUXFLOAT sont maintenant présentés sous forme d’entiers (integer). Ne vous inquiétez donc pas de voir des valeurs radicalement différentes affichées dans cette version.
[ATTENTION] Vos PID en LUXFLOAT version 2.5.4 (la version précédente) doivent être convertis avant d’être rentrés dans le configurateur. Un facteur x40 doit être appliqué sur toutes les valeurs de vos PID par rapport à une configuration en 2.5.4.
La « release notes » complète…
Pour une liste complète des changements, je vous invite à parcourir la liste ci-dessous (en anglais) :
- Improved performance of roll / yaw mixing to fpv cam feature
- Added vbat_hysteresis configurable parameter for vbat alarms
- Improved cli dump. « dump » = print all current active config, « dump all » = dump full config (all profiles and rates). Also no more pauses needed after pasting
- New additional esc passthough support added for Simonk bootloaders and blheli (example for esc #1: escprog sk 1 or escprog bl 1 for blheli) See wiki for explaination, which will be added soon
- Dterm filtering improved. Enabled by default. Dterm can now even be increased without fear for noise
- Luxfloat pids changed to integer and increased in configurable range. All pid controllers now share same PID bank. Luxfloat pids are now scaled to be close to rewrite. See wiki for conversion.
- Slight increase in rewrite yaw rate to match roll and pitch better. rate of 100 is now equal to 80 for example
- Acro Plus feature is depricated and replaced by Super Expo feature, which works differently. The feature is derived from multiwii and only applied to luxfloat and rewrite. super_expo_factor determines the super rate curve
- New optimized defaults
- Additional thresholds for Iterm reset in super expo mode added (yaw iterm reset is always active)
- Fixed gyro calibration on arming features. Arming won’t happen before gyro finished calibration
- Changed some parameter naming conventions in cli (mainly to prevent some copy paste behaviour and to have more clear naming)
- Improved yaw noise filtering
- Removed D on yaw from all pid controllers. This saves the pid controller some calculations. Dterm on yaw isnt really needed
Où télécharger cette version…
 Comme d’habitude, cette version peut être téléchargée sur la page de « Releases » de Betaflight, et pourra être flashée via « Cleanflight Configurator » sous Chrome.
Comme d’habitude, cette version peut être téléchargée sur la page de « Releases » de Betaflight, et pourra être flashée via « Cleanflight Configurator » sous Chrome.
Et n’oubliez pas le WIKI (en anglais) de Betaflight, qui est une petite mine d’informations, mise à jour régulièrement avec les nouveautés au fil des versions 🙂
Bons vols,



Comment j’ai hâte de là tester !!!!
Merci pour cet article je l ai essayé ce wk alors que j’étais fâché avec beta et était revenu sur cleanflight 1.12, je dois dire que là il y a u un très beau travail de fait superbe comportement en vole .
Le comportement decrit est exactement ce que je ressent avec la kiss Fc! Interessant en tout cas car je suis tombé acro a cette sensation super expo!
le flash des esc boot loader SimonK marche nickel avec la béta de Betaflight, c’est du bonheur…
Merci Olivier pour ce super article !
J’ai commandé une FX Lux pour passer en 2.5.4 (actuellement en 2.1.6 en Naze rev5). Je suis inquiet de passer sur une autre version/looptime car pas de repère sur les PID à mettre en place en fonction du looptime/version/config. Il y a pas un wiki qui trace des PID par defaut en fonction de ces éléments ? tout au moins pour avoir une base, ou encore des conseils sur les valeurs à modifier si on descend/monte le looptime ?
Tu nous fais quand un Tuto « comment régler ses PID » ?
T_rage
On recommence à suivre ici ?
Joli boulot, hâte d’essayer ça 🙂
par contre malgré la version 14.4.0.5.1 de blhelisuite, je ne parviens pas à lire mes esc Dys avec bootloader SK et firmware blheli 14.4.
lorsque je me connecte à la FC il affiche les 4 esc sans nom et impossible de lire les réglages qui sont dessus, ni de les flasher… en fait exactement le même symptôme qu’avec la version 14.4.0.3 stable (je suis bien en betaflight 2.6.0 sur la FC je précise…)!
c’est moi qui bug ou c’est pas encore au point?
https://github.com/4712betaflight/betaflight/releases/tag/4way-interface-v2.60 … 😉
Roohhhhh trop bieeennnnnnn, merci Arnoz !!!!!
Ca fonctionne nickel maintenant !!!
A dieu dongle afro et connecteurs en tous genres, bonjour soudures propres et fils à la longueur, mon 180 va être un poids plume !!
mais je ne l’avais pas vu, elle était ou cette release???
La version 2.6.1 vient tout juste de sortir, et comme annoncé, il y a dedans la version « finale » du passthrough » pour flasher ses ESC SimonK comme BLHeli, ainsi que le flash à travers les ports USB VCP 😉
[…] Betaflight 2.6.0 […]
merci Olivier pour toutes ces infos, tu conseilles quoi comme PID de départ ? Luxfloat, MultiWii 2.3 ?
Je préconise de commencer avec REWRITE 🙂 D’abord avec les PID par défaut, à ajuster ensuite en fonction des réactions de la machine.
nickel merci pour l’info j’attend de recevoir mon nouveau rx Storm S603 pour faire la maj 🙂
dernière petite question ^^ avec une CC3D Atom Mini il faut que je prenne la release betaflight_2.6.1_CC3D.hex ?
merci pour tout !
Si tu as changé le bootloader de la cc3d oui, sinon c’est le .bin qu’il te faudra 🙂
Si tu prends la version .bin, tu pourras la flasher via le câble USB en flashant manuellement par le biais d’openpilot GCS, ça c’est l’avantage, l’inconvénient c’est qu’à cause de la petite taille de la mémoire flash de la CC3D Boris a du sacrifier un certain nombre de fonctionnalité de son firmware pour le faire rentrer dans la NAND de la CC3D (comme le Airmode par exemple, de mémoire…)
Par contre si tu veux la version complète du firmware, il te faudra flasher la mémoire par le Main Port avec un adaptateur FTDI, en ayant pris soin de démarrer la CC3D en bootloader mode, c’est moins pratique et c’est un peu plus contraignant pour les mises à jour, mais ça fonctionne très bien. En revanche tu auras les mêmes fonctionnalité qu’avec une Naze32 🙂
petit tuto intéressant sur la chose : http://www.helicomicro.com/betaflight-cc3d-le-grand-tuto/
lol, il me rappelle quelque chose ce tuto 😉 (j’en suis l’auteur ;))
merci Olivier et Ptitmann j’y vois un peu plus clair 🙂
je n’ai pas changé le bootloader car je viens juste de recevoir mon kit Diatone 160 Power Set G160 🙂
ça me semble un peu compliqué c’est dommage car avec ton tuto je trouve le flashage de ma Naze32 avec Cleanflight simple, là ça devient un peu plus chaud avec betaflight_2.6.1_CC3D_OPBL.bin
vous auriez un adaptateur FTDI à me conseiller de préférence sur un shop Français ? j’ai fait mes recherches via google mais il y a pour des arduino je ne sais pas lequel choisir
j’ai démonté le boitier de la carte et évidement rien d’indiqué dessus à propos du +3.3V et SBL 🙁
la carte n’est pas compatible avec cette manip ?