
 pour radios FrSky Taranis (OpenTX 2.2)")
")






 Dans ce tuto, nous allons voir comment calibrer ses ESC sous BLHeli à partir de Betaflight ou Cleanflight.
Dans ce tuto, nous allons voir comment calibrer ses ESC sous BLHeli à partir de Betaflight ou Cleanflight.
Depuis quelques semaines, en parcourant les forums ou les réseaux sociaux, je retrouve plusieurs méthodes de calibration des ESC, qui n’ont pas la même approche, et qui (pour ne rien arranger !) peuvent varier en fonction de la version de BLHeli utilisée (< 14.4, et à partir de 14.5).
Pour essayer de clarifier tout cela, nous allons voir ici une méthode pour calibrer ses ESC (car il en existe certainement plusieurs). Au fil des machines montées et de l’évolution des versions de BLHeli, j’ai affiné cette méthode pour qu’elle soit (je l’espère) le plus clair possible, en restant la plus fiable possible. Elle a le mérite de bien fonctionner et d’être valable quelle que soit la version et le protocole utilisé sur vos ESC (oneshot125, oneshot42 ou multishot). Je parle de « version », car depuis la version 14.5 de BLHeli, les « anciennes » méthodes de calibration ne fonctionnent plus systématiquement et il faut être plus vigilant, car si la calibration n’est pas faite correctement, cela peut provoquer des comportements non souhaités comme des « spasmes » / « glitch » de vos moteurs, des désynchronisations en vol, des « stall » (moteur qui cale) d’un ou plusieurs moteurs, etc…
Pourquoi faut-il calibrer ses ESC ?
La calibration des ESC est une étape importante dans la configuration de sa machine. En effet, cela va permettre à votre FC (carte de vol) et à vos ESC d’apprendre l’un de l’autre quel est le minimum et quel est le maximum, dans la plage des régimes moteurs, à utiliser entre eux. Sans ces valeurs, la carte de vol sera incapable de faire voler votre multi (ou très mal !).
On en déduit facilement que la calibration est à refaire à chaque fois que l’on changera de version de BLHeli, d’ESC et / ou de moteur, et idéalement (c’est ce que je fais pour ma part) à chaque version de Cleanflight ou Betaflight installée !
Les pré-requis…
Je vais supposer dans ce tuto que vos ESC sont déjà flashés dans la version de BLHeli souhaitée (ex. : 14.4, 14.5 ou 14.6, qui sont à ce jour les versions les plus répandues). Si ce n’est pas le cas, je vous invite à suivre ce tuto qui vous permettra de les flasher.
Nous utiliserons BLHeli Suite 16.0.14.5.0.1 pour gérer les paramètres de nos ESC et Betaflight 2.7.1 sur la FC. Le tout sur un PC sous Windows 7 (x64).
Les variables utilisées…
Avant de passer à la calibration en elle-même, attardons nous quelques instants sur les variables utilisées dans la configuration de Betaflight et Cleanflight pour la calibration :
min_command, min_throttle, max_throttle.
En voici une définition « simplifiée » (le but n’est pas ici de vous faire une définition parfaite, mais de vous faire comprendre, pour une calibration des ESC, à quoi servent ces variables).
- min_command : c’est la valeur minimum envoyée (par la FC) aux ESC pour leur indiquer qu’à cette valeur les moteurs sont à l’arrêt (je n’ai pas dit « tournant au régime minimum », j’ai bien dit « à l’arrêt complet », en d’autres termes : « éteints »).
- min_throttle : c’est la valeur minimum (envoyée par la FC aux ESC), à laquelle les moteurs tournent tous de manière « fluide » (sans saccade). A déterminer justement (cf. la suite de ce tuto)
- max_throttle : c’est la valeur maximum (envoyée par la FC aux ESC) pour leur demander de tourner « à fond ». C’est également la valeur utilisée lors de la calibration pour dire aux ESC : là, la FC envoie l’ordre « maximum ». La valeur optimale est à déterminer (cf. la suite de ce tuto).
Calibration initiale…
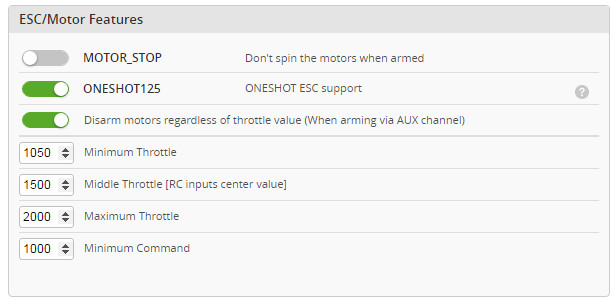 Avant de lancer la calibration de nos ESC, il faut enregistrer les bonnes valeurs des variables vu précédemment. Pour cela, rendez-vous (dans le configurateur Cleanflight sous Chrome) dans l’onglet « Configuration », et dans le bloc « ESC/Motor Features », et rentrez ces valeurs (n’oubliez pas ensuite de vous rendre en bas de la page et d’appuyer sur le bouton « Save and Reboot ») :
Avant de lancer la calibration de nos ESC, il faut enregistrer les bonnes valeurs des variables vu précédemment. Pour cela, rendez-vous (dans le configurateur Cleanflight sous Chrome) dans l’onglet « Configuration », et dans le bloc « ESC/Motor Features », et rentrez ces valeurs (n’oubliez pas ensuite de vous rendre en bas de la page et d’appuyer sur le bouton « Save and Reboot ») :
- min_command = 1000 (Minimum Command)
- max_throttle = 2000 (Maximum Throttle)
La valeur de min_throttle importe peu ici, car elle se sera pas utilisée dans cette partie.
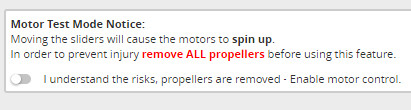
[ATTENTION] TOUTES les phases de calibration des ESC se font SANS HELICES !!!!
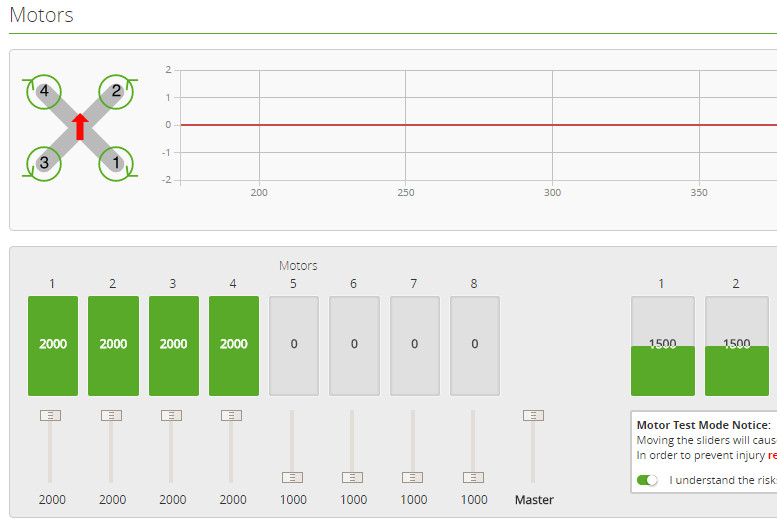
Allez ensuite dans l’onglet « Motors », et activez le bouton « Motor Test Mode » :
 Déplacez le curseur « Master » tout en haut (à fond). Les valeurs des 4 moteurs doivent alors passer à 2000 (valeur que nous avons mis pour max_throttle) :
Déplacez le curseur « Master » tout en haut (à fond). Les valeurs des 4 moteurs doivent alors passer à 2000 (valeur que nous avons mis pour max_throttle) :
 Branchez alors votre lipo, vos ESC « chantent » (petite musique indiquant que vous êtes en mode calibration justement) – Pour l’anecdote, ce ne sont pas les ESC qui chantent mais les moteurs 😉 . Lorsque la musique s’arrête (au bout de quelques secondes), baissez rapidement le curseur « Master » au minimum – la valeur indiquée par vos moteurs sera alors 1000 (valeur de min_command) :
Branchez alors votre lipo, vos ESC « chantent » (petite musique indiquant que vous êtes en mode calibration justement) – Pour l’anecdote, ce ne sont pas les ESC qui chantent mais les moteurs 😉 . Lorsque la musique s’arrête (au bout de quelques secondes), baissez rapidement le curseur « Master » au minimum – la valeur indiquée par vos moteurs sera alors 1000 (valeur de min_command) :
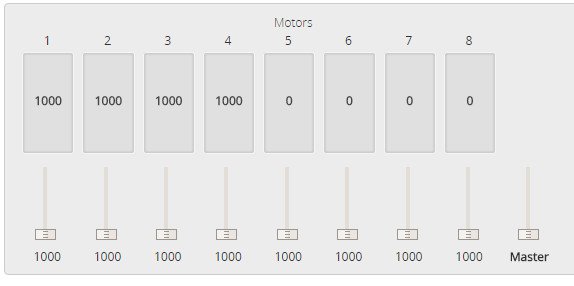 Une autre petite musique s’enclenche alors, et s’arrête quelques secondes plus tard : la calibration initiale est terminée !
Une autre petite musique s’enclenche alors, et s’arrête quelques secondes plus tard : la calibration initiale est terminée !
Débranchez la lipo, et décochez le bouton « Test Motor Mode » :
 Si vous utilisez une version BLHeli 14.5 ou supérieure, NE VOUS ARRÊTEZ PAS LA 😉 ! Il vous faut aller dans BLHeli pour vérifier les valeurs PPM Min Throttle et PPM Max Throttle de calibration :
Si vous utilisez une version BLHeli 14.5 ou supérieure, NE VOUS ARRÊTEZ PAS LA 😉 ! Il vous faut aller dans BLHeli pour vérifier les valeurs PPM Min Throttle et PPM Max Throttle de calibration : 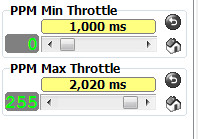
[ASTUCE] Il est tout à fait normal que dans BLHeli Suite, les valeurs « PPM Min » et « PPM Max » soient légèrement différentes d’un ESC à un autre ! Ne cherchez surtout pas à faire en sorte qu’elles soient identiques pour vos 4 ESC…
Lancez BLHeli Suite et connectez-vous à vos ESC. Vérifiez alors pour CHAQUE ESC, les deux valeurs indiquées en bas à droite : PPM Min Throttle et PPM Max Throttle. Ces deux valeurs ne doivent PAS être égale à respectivement 1000 et/ou 2020. Si c’est le cas, il y a de fortes chances que vous ayez une calibration dite « hors plage ». Et il faut alors y remédier avant d’aller plus loin !
[INFO] Si BLHeli affiche 2020 pour le PPM Max Throttle (car le plus fréquent depuis la version 14.5 de BLHeli), c’est probablement que le max est encore au delà de cette valeur, mais ne pouvant pas afficher plus que 2020, l’application affichera cette valeur « trompeuse ». De la même manière, s’il affiche 1000 pour le PPM Min Throttle, il se peut que le min soit en deçà de cette valeur.
Voici la marche à suivre si vous êtes « hors plage » :
Retournez dans le configurateur Cleanflight sous Chrome, et changez les valeurs de min_command (qui contrôle le minimum, il faut donc l’augmenter) et de max_throttle (qui contrôle le maximum, il faut donc le baisser) :
- Si vous étiez à 2020 dans BLHeli pour le « PPM Max », baissez dans Betaflight la valeur du max_throttle à 1980 dans un premier temps.
- Si vous étiez à 1000 dans BLHeli pour le « PPM Min », augmentez la valeur du min_command dans Betaflight, à 1020 dans un premier temps.
Relancez alors une calibration initiale (en reprenant ce tuto au paragraphe « Calibration Initiale » avec les valeurs ci-dessus).
Après avoir refait la calibration initiale avec les valeurs ci-dessus, retournez encore une fois dans BLHeli Suite et vérifiez à nouveau les valeurs PPM Min et PPM Max. Si celles-ci sont différentes de 1000 et 2020, c’est tout bon ! Sinon, vous avez gagné un troisième tour 😉
Recherche des valeurs optimales…
[ATTENTION] Dans cette partie, le temps de trouver les bonnes valeurs, vos moteurs et ESC vont tourner plusieurs secondes voir plusieurs dizaines de secondes à vide, sans hélices ! Ils peuvent ainsi chauffer et brûler !!!!!
Je vous conseille vivement de ne pas le faire avec vos lipos 4S (pour ceux qui volent en 4S), au risque de griller ESC ou moteur ou bien les deux !
Utilisez plutôt une lipo 3S, de préférence avec moins de 50% de charge, pour que le voltage envoyé aux ESC et moteurs soit le plus faible possible. Cela préservera votre électronique 😉
Pour mes réglages, j’utilise une vieille lipo 3S 1300mah 35C déchargée à 40%.
Maintenant que la calibration initiale est terminée, nous allons chercher les valeurs optimales pour les variables min_throttle et max_throttle.
Surtout ne vous arrêtez pas à la calibration initiale, car votre carte de vol et vos ESC ne sont pas utilisables en l’état !
Valeur optimale du min_throttle…
Commençons par chercher la valeur minimum à laquelle tous les moteurs tournent sans saccade et sans caler.
Pour cela, rendez-vous dans l’onglet « Motors » à nouveau, et activez le « Motor Test Mode » (le curseur Master est quant à lui au minimum) et branchez votre lipo 3S.
 Placez vous sur le moteur 1 et faites monter le curseur tout doucement, jusqu’à ce que le moteur correspondant tourne sans saccade et de manière fluide. Dans notre exemple, il tourne de manière fluide à une valeur de 1028. Notez cette valeur et repassez à 1000 (valeur minimum).
Placez vous sur le moteur 1 et faites monter le curseur tout doucement, jusqu’à ce que le moteur correspondant tourne sans saccade et de manière fluide. Dans notre exemple, il tourne de manière fluide à une valeur de 1028. Notez cette valeur et repassez à 1000 (valeur minimum).
Répétez l’opération pour les moteurs 2, 3 et 4 et notez pour chacun d’eux la valeur correspondante. Dans notre exemple, nous avons : 1024, 1027 et 1028 pour les moteurs 2, 3 et 4.
Prenez la valeur la plus élevée des 4, ici 1028, ajoutez une « marge de sécurité » (personnellement, pour des moteurs qui tournent aux alentours de 1025 – 1030, je met 1050 comme valeur), cela devient votre valeur min_throttle optimale !
Allez dans l’onglet « Configuration » et rentrez cette valeur dans la case « Minimum Throttle » et sauvegardez ensuite cette valeur en cliquant sur le bouton « Save and Reboot ».
[INFO] Sur les forums et les réseaux sociaux, on trouve de tout concernant cette valeur de « marge de sécurité« . Certains vous dirons qu’avec 5 de marge, cela vole très bien, d’autres qu’il faut mettre au moins 30 à 40 de marge…
Personnellement, j’avais, il y a de cela plusieurs mois, une marge de 50 (oui oui, à l’époque c’était la valeur préconisée ! lol), puis, j’ai testé avec 5 de marge, mais j’ai eu des soucis de moteurs qui calaient lors de grosses reprises ou de virages très serrées, et je me suis arrêté, ces temps-ci, sur une marge d’environ 20 qui convient dans toutes les situations (courses, freeride, freestyle, cool ou en mode virages secs).
[ASCTUCE] Cette marge de 20 permet de garantir des moteurs qui ne caleront pas lors de grosses manœuvres, mais garantie également, lors d’une descente avec les gaz au minimum, assez d’accroche pour gérer la stabilité de votre machine (avec l’AIRMode activé bien entendu). Sinon dans certains cas, l’airmode ne pourra pas stabiliser la machine, car les moteurs n’auront pas assez d’accroche / force pour stabiliser l’ensemble.
A partir de BLHeli 14.5, dans certains cas, la valeur à laquelle les moteurs tournent de manière fluide peut être trompeuse. Il ressort des tests effectués et des échanges sur les forums (RCGroups notamment) qu’il vaut mieux ajouter une « bonne » marge, même si les moteurs tournent à très bas régime. D’après les tests que j’ai pu effectuer sur mes machines, notamment en Multishot (14.5 et 14.6), j’avais des valeurs entre 1040 et 1070 comme min_throttle (ESC Littlebee 20A & 30A).
Valeur optimale du max_throttle…
Pour déterminer la bonne valeur du max_throttle, nous allons utiliser une méthode similaire mais cette fois-ci dans le haut de la plage moteur.
Rendez-vous encore une fois dans l’onglet « Motors », activez le « Motor Test Mode » (le curseur Master est quant à lui au minimum) et branchez votre lipo 3S.
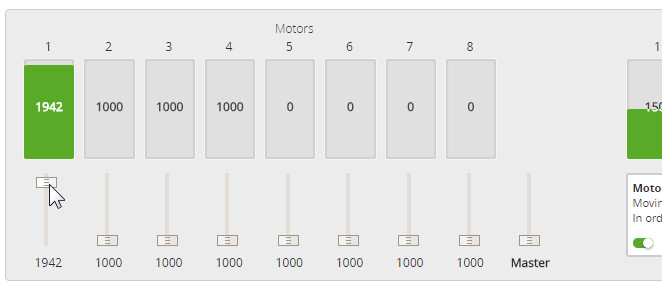 Placez-vous sur le moteur 1 et mettez le curseur au maximum (2000) :
Placez-vous sur le moteur 1 et mettez le curseur au maximum (2000) :
Ecoutez (non, c’est pas une blague 🙂 ) le moteur tourner et faites descendre cran par cran le curseur. Vous allez vous apercevoir qu’au départ, le moteur ne change pas de régime, il se trouve sur un régime « plateau ». Continuez à descendre le curseur jusqu’à ce que le régime moteur change ! Vous êtes alors sorti du régime « plateau », c’est cette valeur charnière qui nous intéresse.
Notez cette valeur à laquelle le régime moteur commence à changer. Dans notre exemple, pour le moteur 1, nous sommes à 1942.
Répétez l’opération pour les moteurs 2, 3, 4 et pour chacun d’entre eux, notez la valeur de changement de régime.
Gardez alors la valeur la plus basse (par ex. : 1942 / 1948 / 1952 / 1944, gardez 1942) et utilisez cette valeur pour la variable max_throttle. Pour cela, allez dans l’onglet « Configuration » et rentrez la valeur dans la case « Maximum Throttle » et sauvegardez le tout en cliquant sur le bouton « Save and Reboot ».
[ASTUCE] Personnellement, j’arrondis la valeur trouvée à la valeur inférieure (multiple de 5) la plus proche. Dans notre exemple, j’ai 1942 comme valeur minimum, je garderai donc 1940 comme valeur de max_throttle.
Et nous voilà arrivés au terme de ce tuto ! Vos ESC sont maintenant calibrés et Betaflight ou Cleanflight configuré avec les valeurs optimales pour ces ESC/Moteurs.
Une dernière chose… Gardez en tête qu’à la prochaine recalibration de vos ESC, il faudra penser à repasser, notamment, la valeur de max_throttle à 2000 avant la « calibration initiale » 😉 On peut facilement l’oublier, d’autant plus si on a pas calibré ses ESC depuis un moment.
Bons vols,



Super article, merci pour ton travail!!
J’ajuste ensuite mes fin de course sur la radio pour avoir les mêmes valeurs que cleanflight. Cela évite les zones mortes
Tu possèdes une Taranis ? Peux tu développer un peu, merci 😉
Faut il que dans la partie receiver, le minimum et maximum correspondent aux valeurs envoyées pas la Taranis ?
dans beta j’ai min commande 1000, maximum throttle 1935
et dans la partie receiver j’ai une plage allant de 991 à 2015
dans l’onglet RECEIVER, il faut que le min et le max (et le milieu également) soient exactement à 1000 (min) 2000 (max) et 1500 (mid / milieu). Donc dans ton cas, il faut modifier les « fins de courses » (end points) de ta radio pour les ajuster pour que DANS Cleanflight / onglet RECEIVER, les valeurs soient 1000 / 1500 / 2000 exactement.
Sinon que se passe-t-il ? Et bien la zone morte s’agrandit dans ton cas, car ta voie des gaz démarre à 991… donc de 991 à min_check = zone morte ! alors que si ta voie envoie 1000 exactement comme valeur min, ta zone morte = 1000 à min_check. Elle va diminuer 😉 Et on peut appliquer le même raisonnement pour le max (avec la variable max_check et le max de ta voie). Pour le milieu à 1500, cela se règle avec le « sub trim » dans ta radio.
Dit autrement, on se fiche pas mal des valeurs indiquées DANS la radio, ce qui importe, c’est ce que la FC reçoit comme signal de la radio, c’est à dire les valeurs que tu vois dans l’onglet RECEIVER 😛
bonjour,
si dans max-check tu as 1900 ce n’est peut être pas la peine d’aller jusqu’à 2000 avec la radio. 1920 suffit non? pour le milieu si tu as 1520 (futaba il me semble) tu peut mettre via le cli, mid_command à 1520 et via le gui le mid throttle à 1520 également?
luc
Oups (lol :)) surtout pas !!! (pour le max_check) : car les valeurs au delà du max_check sont utilisées malgré tout (pas pour piloter, mais pour détecter la zone, notamment, qui permet de rentrer en mode configuration via les sticks). L’objectif est toujours d’avoir 1000 en min et 2000 en max lorsque tu bouges les sticks de ta radio, ensuite si tu obtiens ces valeurs (et seulement si tu obtiens exactement ces valeurs !), tu peux mettre 1040 en min_check et 1960 en max_check, ce qui optimise l’utilisation de ton manche des gaz (et diminue donc les « trous » qu’il peut y avoir en bas du manche des gaz et en haut).
Super tuto encore.
Bien complet.
Merci.
Gros travail qui va servir à plus d’un , merci
Question : le rôle exact de min Check et Max Check ?
Est ce une bonne façon de jouer avec le min Check pour éliminer la plage morte en début de gaz ? ( si je laisse par défaut à 1100 ça va pas chez moi )
Cela fera l’objet d’un tuto à part 😉 Pour répondre à ta question : oui le fait de jouer sur le min_check va diminuer la zone morte en début de course des gaz. Mais il faut le lier également à un autre paramètre : la course de tes manches dans l’onglet RECEIVER qui doivent être exactement à 1000 au minimum et à 2000 au maximum.
merci pour la reponse Olivier.
donc si je comprends bien. je fais correpondre la plage de la taranis dans mon cas de 1000 à 1935.
je me pose une autre question. pourquoi mettre comme valeur max la valeur a laquelle les moteurs changent de regime ? cela ne va t il pas brider le max du moteur ?
merci
Non non surtout pas 😉 (pour le « à 1935 ») : La partie radio et ce qu’on envoie aux ESC/moteurs n’a rien à voir… Pour l’onglet RECEIVER, il faut TOUJOURS aller de 1000 (min) à 2000 (max) quelles que soient les valeurs trouvées en max_throttle via ce tuto (ou via n’importe quelle autre méthode d’aileurs) ! Il y a d’un côté la configuration RADIO < -> FC et d’un autre côté (complètement à part) la configuration FC < -> ESC/Moteurs (c’est l’objet de ce tuto :))
Pour ce qui est du Max, au contraire de le brider, cela va l’optimiser puisqu’à un moment dans tous les cas, il a atteint son régime maximum, donc on fait en sorte qu’il corresponde à « l’ordre max envoyé par la FC ». D’autre part, on pourrait se dire, on va brider les 2 ou 3 moteurs qui ont un régime max supérieur à celui qui est en deçà… là je ne peux répondre que OUI. Mais… Il faut garder à l’esprit qu’avec un multirotor, on n’a pas qu’un seul moteur, mais 4 qui marchent de concert pour faire voler notre machine, du coup si on veut qu’il vole « droit » il faut bien que les 4 moteurs soient « calés » sur celui qui a le moins de ressources (comme dans une course par équipe, l’important c’est pas que le plus rapide arrive le premier… mais que toute l’équipe arrive en même temps 😉 )
Merci pour les infos.
Dois je aussi mettre 1000 – 2000 pour les autres axes ?
Oui 😉 pour toutes les voies utilisées.
parfait, good job ?
rololo le tuto de fou 🙂 c’est bien expliqué parce que j’ai tout compris.
je vois venir un gros SAV derrière à mon avis, mais t’es au top !
[…] Je vous conseille également cet article sur le blog RC Tidom : https://blog-rc.tidom.net/calibrer-esc-betaflight-cleanflight/ […]
Merci Olivier, c’est parfait comme d’habitude 😉
Bonjour,
J’ajouterai juste que personnellement j’ai du baisser le min_command lorsque oneshot125 est activé dans cleanflight. Sinon j’ai mes moteurs qui saccade à l’arrêt. J’avais vu cette astuce fort pratique dans un tuto dont je ne retrouve plus le lien…
Excellent article : j’ai gagné +90 de marge entre mon ancien Min et Max Throttle grâce à ta méthode amenant plus de précision. Sur ce plan, je me servais pas de BLHELI auparavant pour faire les ajustement necessaire en relation avec BetaFlight. Maintenant, oui 🙂
Merci Olivier (on était ensemble dans le pool 11 au FpvAirShow) 🙂
Bonsoir,
En effet, (si j’ai bien compris) on ressere l’étaud sur la précision des ESC d’une certaine manière.
Pour mon cas, je m’apperçois que je suis bien en dessous des valeurs 2000 pour le max Throttle (1790 environ)
et pourtant je suis sur du 30A en 2205/2500 kv, ma valeur max était de 1850 (anciennement) j’ai compris que j’avais des valeurs bien supérieur à ce que j’avais réellement, même si on doit rajouter « une marge de sécurité ».
Merci pour ce tuto encore une fois trés clair /bow!
Bon vole 🙂
Merci mon cher Titi, un fois de plus, d’éclairer nos pâles lanternes !
bonjour un renseignement je suis un peu perdu.
Je dois flasher ma naze en premier (installer betaflight ) puis ensuite flasher et calibrer mes esc?
la 4.6 a un menu de plus et je n arrive pas a entrer vos valeurs
Bonjour, Oui il faut flasher la Naze en premier pour ensuite l’utiliser pour flasher et calibrer les ESC.
merci !!
Je n’ai plus de musique lors du calibrage non plus? little bee 30A
Pour commencer ,UN GROS MERCI!!! pour ce tuto je debut dans le FPV et je trouve tellement d’info sur ton site que c’est un de mes favoris encore BRAVO!!
maintenant j’ai une question a propos du calibrage des ESC
tu dis que c’est conseiller de prendre une 3S a 50% au lieu de 4S
mais es ce que ca fausse pas les donnée du MAX throttle?
Merci tout d’abord 🙂 Ensuite, non, des tests que j’ai pu faire (j’ai déjà comparé avec du 4S – en faisant « au plus vite » pour éviter de trop faire chauffer les ESC et moteurs – et je trouvais exactement les mêmes valeurs) et de ce que j’ai également pu lire sur différents forums, utiliser une batterie 3S ne modifie pas la valeur « charnière » du Max Throttle 😉
Merci pour ce superbe TUTO
Salut,
merci pour ce super tuto tout d’abord !
il me reste un petit problème, quand je connecte ma radio avec mon zmr250
et que j’arme les moteurs, ils tournent tout de suite à fond, aucune différence selon la position du stick des gaz.
Pourtant dans Cleanflight ils tournent super bien à différentes vitesses, j’ai pu suivre le tuto jusqu’à la fin et les ESC sont calibrés.
J’ai une spektrum DX8, naze32, satellite Lemon RX en SERIAL_RX, dys sn20A, dys be2204-2400kv
Je suis sous le firmware betaflight 2.7.1 si jamais
Si quelqu’un a une idée, ça serait top svp =D
merci !
Salut,
Super tuto ! Bravo !
Mais j’ai un gros souci… j’ai mis à jour mes esc avec la dernière version BL Héli 14.6 sur mes 2 drones (l’un a un bootloader BL Héli, l’autre un SimonK).
J’ai suivi scrupuleusement ta procédure de calibration
Mais comme vous pouvez le voir dans mes vidéos, c’est très étrange, quand je monte doucement la vitesse, les moteurs commencent à tourner doucement puis se mettent à accélérer et ralentir n’importe comment. Quand je regarde en même temps le monitoring des moteurs dans Cleanflight c’est du n’importe quoi, seul le moteur 1 à l’air de tourner normalement.
Puis lorsque j’essaie de descendre la vitesse, rien à faire ça ne répond pas.
J’ai regardé dans l’onglet Receiver de Cleanfight et tout répond parfaitement au niveau de la radio switches et manches.
Le comportement est identique sur mes 2 drones.
Je suis complètement perdu. Je joins une capture écran des paramètres des esc et 2 vidéos que j’ai mises en ligne.
Si quelqu’un peut m’éclairer, car là je ne comprends plus rien, et mes 2 drones sont cloués au sol !!!
Moteurs+radio : https://youtu.be/skRHK9wrHJY
Monitoring moteurs dans cleanflight https://youtu.be/0IXW0Ep-sNw
Merci
Si tu as l’AirMode actif (même sans AirMode d’ailleurs, mais dans une moindre mesure), c’est normal (j’ai pas dit que c’était forcément ca, mais c’est une possibilité 😛 ) car la carte de vol essaie de compenser, mais comme il est « bloqué » au sol, il surcompense… surcompense, etc… jusqu’à être « à fond », et là il ne peut plus aller plus haut, mais l’ordre demandé n’est toujours pas atteint, donc il reste « bêtement » à fond 🙂
PS : d’autres causes possibles : le fait d’être en mode ANGLE sur ta table, ou encore des PID mal réglés (mais vraiment mal du coup !)
Merci ! Le mieux alors et que j’essaie un vol pour voir comment il se comporte !
Slt super tuto, merci !!!
Par contre on doit mettre quoi comme valeur dans min_command une fois les réglages effectués ?
Si tu n’y a pas touché pendant les réglages (cf. lorsque je l’évoque dans le tuto), pas besoin de changer la valeur par défaut la plupart du temps 🙂 (valeur par défaut à 1000).
Là où j’ai du y toucher, c’est avec certains ESC, dans les versions récentes de BLHeli (14.5 & 14.6) en Multishot notamment. Notamment pour éviter les petits « tic tic » du moteur (petits mouvement du moteur qui fait mine de démarrer sur 1/8è de tour, même en étant désarmé). Si cela arrive, je monte le min_command lors de la calibration (j’ai du le monter jusqu’à 1030 dans certains cas), je calibre, et une fois calibré je le remet à 1000 (sans recalibrer cette fois !) et les moteurs bronchent plus 😛
Ah bien justement j’avais ce problème de moteur qui tourne tout seul en étant désarmé !
Par contre quand tu dis que tu calibres, c’est-à-dire qu’il faut reprendre tout le processus de calibration de ton tuto, ou juste faire le processus de Cleanflight (master à fond, branchement batterie, musique, master au mini) ?
Merci
Merci, j’avais fait des essais et j’ai constaté que la course du bas de manche de gaz était importante avant que les moteurs démarrent, en mettant un min_command a 1040 par le CLI cette course est réduite je trouve que c’est mieux ! En espérant que cela ne crée pas d’autres soucis … je ferais des essais en vol des que possible
bonjour, et encore merci pour tout tes tutos. quel temps gagner pour nous. tu devrait les éditer. sinon, au niveau de la calibration, pourquoi ne pas aller voir ce qui est déja programmé en min throttle et max throttle dans les esc via bhheli suite (par exemple 1138 et 1832 pour dys20Amulti) et le reporter dans bétaflight avant de faire la calibration. est-ce pour adapter au mieux les esc aux moteurs? pourquoi ne pas laisser la valeur par défaut 1150 et 1850?
luc
Bonjour,
Pour le report des valeurs qu’il y a dans BLHeli dans Betaflight : dans l’idée ce serait bien 🙂 mais on ne peut pas car il n’y a pas de correspondance entre les valeurs dans BLHeli et celles définies dans Betaflight…
Pour voler, tu peux laisser les valeurs 1150 et 1850 (qui sont des valeurs « sécurité » dans le sens, elles fonctionneront quels que soient les ESC)… Mais dans ce cas, la plage utilisée ne sera pas du tout optimisée 🙁 d’où le fait de calibrer les ESC, justement pour utiliser toute la plage de puissance disponible, et optimiser ainsi la communication entre Betaflight et les ESC / Moteurs.