
 pour radios FrSky Taranis (OpenTX 2.2)")
")






f – « Modes »
L’onglet « Modes » permet de choisir quel inter va activer quelle fonction, par exemple le mode de vole ANGLE, HORIZON ou bien activer l’AIR MODE de Betaflight, le FAILSAFE, le déclenchement de l’enregistrement d’une BLACKBOX ou le BUZZER, etc…
 Dans un premier temps, voyons comment utiliser cet onglet : si vous voulez utiliser une ligne en particulier, appuyez sur « Add Range« , une barre verte avec des curseurs apparait alors au centre de la ligne correspondante :
Dans un premier temps, voyons comment utiliser cet onglet : si vous voulez utiliser une ligne en particulier, appuyez sur « Add Range« , une barre verte avec des curseurs apparait alors au centre de la ligne correspondante :
![]() Si vous vous êtes trompé de ligne, pas de panique, appuyez sur la croix à la fin de la ligne, cela supprime la ligne en question !
Si vous vous êtes trompé de ligne, pas de panique, appuyez sur la croix à la fin de la ligne, cela supprime la ligne en question !
Pour chaque ligne, il vous reste deux choses à faire : choisir la bonne plage (déplacer la ligne verte), et choisir la voie qui va contrôler la fonctionnalité correspondante. Voyons cela avec des exemples :
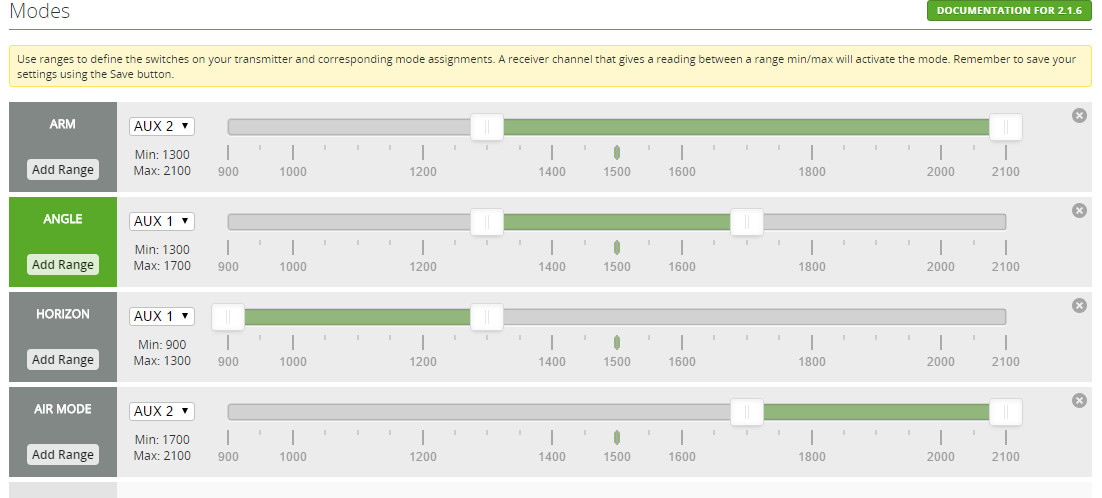
Ex. : Je souhaite armer via un inter qui est sur la voie AUX2, lorsque mon inter est en position « haute » :
Appuyez sur « Add Range » sur la ligne où se trouve « ARM » (cf capture d’écran ci-dessus), vous voyez alors AUX1 (à gauche) et le segment verre au centre. Dans cette configuration, mon inter AUX1 va armer lorsque sa valeur est comprise entre 1300 et 1700 (ce qui correspond à une valeur autour du neutre avec une bonne marge lol). Sauf que ce n’est pas ce que je veux, déjà je souhaite utiliser AUX1, et bien dans la liste déroulante à gauche, je choisis « AUX2 », et au niveau valeur je veux que mon inter soit actif lorsqu’il est en position « haute », je vais donc déplacer ma barre verte vers la droite pour « englober » la valeur 2000 (de 1700 à 2100 dans notre cas), et j’obtiens alors cela :
![]() Et voila ! je peux maintenant configurer tous les modes de cette manière ! Mais (il faut bien un mais !) vous allez me dire : comment je fais pour avec UN SEUL inter qui me permet d’avoir (au hasard !) ANGLE au neutre, HORIZON en bas, et ACCRO en haut ?? Et bien, je vais procéder de la même manière et obtenir ceci :
Et voila ! je peux maintenant configurer tous les modes de cette manière ! Mais (il faut bien un mais !) vous allez me dire : comment je fais pour avec UN SEUL inter qui me permet d’avoir (au hasard !) ANGLE au neutre, HORIZON en bas, et ACCRO en haut ?? Et bien, je vais procéder de la même manière et obtenir ceci :
 Sur cette capture d’écran, je vois que : AUX1 est bien noté sur les deux lignes, donc c’est lui qui va contrôler ces deux modes, et pour angle, ma barre verte est au centre, donc correspond à mon inter en position milieu, et horizon est à gauche, donc correspond à mon inter en position basse. Et ACCRO alors ??
Sur cette capture d’écran, je vois que : AUX1 est bien noté sur les deux lignes, donc c’est lui qui va contrôler ces deux modes, et pour angle, ma barre verte est au centre, donc correspond à mon inter en position milieu, et horizon est à gauche, donc correspond à mon inter en position basse. Et ACCRO alors ??
Le mode ACCRO est le mode par « défaut » dans Cleanflight / Betaflight, du coup si vous ne sélectionnez aucun des deux modes ANGLE ou HORIZON, vous serez en mode ACCRO (et si vous regardez la capture d’écran, on voit que lorsque mon inter AUX1 est en position haute, ni le mode angle, ni le mode horizon ne sont sélectionnés, du coup… je suis en mode ACCRO ;))
Un dernier exemple pour la route (car il est souvent utilisé ces temps-ci en betaflight pour contrôler le AIR MODE) : Je souhaite ARMER lorsque mon inter est en position milieu ET haute, et faire en sorte que le AIR MODE lui ne soit actif que lorsque mon inter est en position haute !
 Regardez le curseur de la souris qui est placé sur le « curseur » blanc de la barre verte ! en cliquant sur ce curseur blanc, vous pouvez « étendre » la barre verte, et faire en sorte qu’elle soit valide pour 2 positions de votre inter (ici position milieu ET position haute). Ensuite, activez l’AIR MODE, et déplacez la barre verte vers la droite pour qu’elle corresponde à votre inter en position haute (dans les deux : ARM et AIR MODE, j’utilise le même inter « AUX2 »), et j’ai donc bien : ARM en position milieu et haute + AIR MODE en position haute 😉
Regardez le curseur de la souris qui est placé sur le « curseur » blanc de la barre verte ! en cliquant sur ce curseur blanc, vous pouvez « étendre » la barre verte, et faire en sorte qu’elle soit valide pour 2 positions de votre inter (ici position milieu ET position haute). Ensuite, activez l’AIR MODE, et déplacez la barre verte vers la droite pour qu’elle corresponde à votre inter en position haute (dans les deux : ARM et AIR MODE, j’utilise le même inter « AUX2 »), et j’ai donc bien : ARM en position milieu et haute + AIR MODE en position haute 😉
Passons à quelques explications sur ces différents mode :
- ARM : permet d’armer via un inter à la place du stick. ATTENTION : dès que vous avez activé ce mode ARM, vous ne pouvez plus utiliser les sticks pour armer, c’est SOIT l’un SOIT l’autre, mais pas les deux !
- ANGLE : permet d’activer le mode ANGLE (utilisation des acc et gyro pour stabiliser le quadri, c’est le mode dit « stab » de la Naze32), il ne permet pas de faire de flips ou de tonneaux car il bloque l’inclinaison à (par défaut) maximum 70°
- HORIZON : c’est un mode « semi » stabilisé. En effet, lorsque vos sticks sont autour du neutre, il se comporte comme le mode ANGLE, en gros il stabilise, mais si vous poussez les sticks plus loin, il permet de faire des flips et des tonneaux, et dès que vous relachez les sticks, il se remet en mode stabilisé. Ce mode est utile pour débuter l’accro avec un quadri, mais je conseille de très vite s’en défaire et de passer au mode ACCRO
- ACCRO : il n’est pas présent dans les modes de vol, car c’est le mode par défaut ! Si vous ne sélectionnez ni ANGLE ni HORIZON et bien par défaut vous êtes en mode ACCRO 🙂
- AIR MODE : (uniquement sous BetaFlight) Ce n’est pas un mode de vol à proprement parlé, mais cela modifie le comportement en vol, c’est en fait un nouvel algorithme de calcul du Mixer et de la boucle de PID (ca y est je vous ai perdu ? lol). En bref, ce AIR MODE permet de garder le contrôle du quadri sur toute la plage du manche des gaz, y compris lorsque le manche des gaz est au minimum (avant le quadri tombait comme une feuille lorsque ce manche était au mini, avec ce AirMode vous gardez le contrôle !), et optimise la stabilisation via les gyro sur toute la plage des gaz. Pour ce qui est des gaz « mini », c’est utilisé essentiellement en « Free Ride » pour faire des figures sur le dos tout en gardant le contrôle, mais le AIR MODE est également utilisé en course (FPV Racing) car la tenue en virage et la stabilité notamment sont meilleures dans ce mode. ATTENTION : le AIR MODE, pour le Free Ride, est à associer avec le MOTOR_STOP (qui faut désactiver !) pour avoir une efficacité maximale.
- BARO / MAG : permet d’activer la stabilisation à l’aide du baromètre et/ou le magnétomètre. Ce n’est pas un mode à utiliser seul, mais en complément du mode ANGLE et HORIZON (jamais testé en vol pour ma part !)
- HEADFREE / HEADADJ : modes de vols complémentaires nécessitant des composants supplémentaires (GPS)
- BEEPER : permet d’activer le beeper de la Naze32 via un inter (pratique pour retrouver son quadri dans les hautes herbes !)
- OSD SW : permet, lorsque vous avez un OSD branché sur la Naze32 (MinimOSD par exemple) de switcher, via un inter, d’un affichage à un autre sur l’OSD (très pratique avec un MinimOSD pour avoir un affichage OSD « complet » par exemple, et un autre plus « épuré »)
- BLACKBOX : permet d’activer l’enregistrement BLACKBOX via un inter plutôt que d’enregistrer le vol entier (utile lorsque votre blackbox ne possède pas beaucoup de mémoire)
- FAILSAFE : permet d’activer le failsafe de la Naze32 à l’aide d’un inter de votre radio (à coupler avec le Failsafe que vous avez activé dans l’onglet configuration, ainsi qu’à des commandes à passer dans le CLI). C’est la méthode que j’utilise sur tous mes quadri pour gérer le failsafe. Si vous utilisez ce mode FAILSAFE, pas besoin d’activer le BUZZER en cas de crash, car le FAILSAFE l’active de manière automatique !
- GTUNE : permet d’activer le mode GTUNE, qui, en bref, permet (en théorie) d’auto régler les valeurs de P (de vos PID) sur les axes Pitch, Roll et Yaw. Je déconseille de l’utiliser, car les résultats sont assez aléatoires, et rarement bons…… 😉
Suivant mes quadris (et suivant que j’utilise ou non les modes stabilisés ANGLE et HORIZON), voici les modes de vols tels qu’ils sont configurés sur mes quadri et hexa :
Lorsque je souhaite armer via un inter et utiliser le AIR MODE :
![]() Lorsque je souhaite armer via les sticks de la radio (GAZ mini + YAW à droite) :
Lorsque je souhaite armer via les sticks de la radio (GAZ mini + YAW à droite) :

![]() Et enfin (sur la plupart des mes quadri maintenant), lorsque je vole exclusivement en mode ACCRO avec armement via un inter :
Et enfin (sur la plupart des mes quadri maintenant), lorsque je vole exclusivement en mode ACCRO avec armement via un inter :

![]()


Merci pour ton retour mais j’ai quand même du mal à comprendre à quoi ça sert min/max check
le min check doit il être supérieur à min_throttle ?
Mes valeurs:
min_throttle = 1050
max_throttle = 2000
bonjour je tente de regler un drone eachine racer 250 avec une carte naze 32et je sais pas quel firmware
telecharger j’ai suivie la procedure de votre blog mais marche pas
j’ai fait des essaies avec open pilot rien et la il reconnais pas la carte.
autre chose quel procedure pour armer les moteurs.
lilian
[…] me suis notamment inspiré des informations données sur le site de Oscarliang, le blog de RC-Tidom et aussi sur AirSanglier (sanglier… quand je vous parlais de druide avant, on n’est pas loin […]
bonjour Olivier ,je pense que tu va avoir pas mal de questions là dessus ,depuis hier ,Cleanflight est passé en 2.0.0 ….et c’est la m… ,impossible de connecter mes Naze dessus ,n’étant pas un crack en anglais,et encore moin avec l’ordi … peut être que tu verrais comment passer à travers qu’on puisse ce connecter ? ça éviterais de tout reprendre de A à Z … Je me demande en même temps si c’est pas l’occasion de passer sur Betaflight ,quitte a tout recommencer.. un conseil ou un avis ?
merci
Bonjour, le seul moyen de récupérer les conf dans une ancienne version 1.X de CF est d’installer un ancien configurateur à la main (via le mode développeur de Chrome, et en allant chercher l’archive ZIP à cette adresse : https://github.com/cleanflight/cleanflight-configurator/releases, le fichier « cleanflight-configurator-1.2.4.zip »), cela permet de récupérer la main sur des anciennes config pour faire une sauvegarde des écrans par exemple, avant de tout reprendre dans cette version 2.0.0 (car oui il faudra repartir de zero). Sinon (je n’ai pas encore testé), tu dois toujours pouvoir, via le CLI du nouveau configurateur, faire un « DUMP » de l’ancienne config, pour pouvoir récupérer les infos dedans… Mais quitte à tout refaire, si tu ne te sert pas d’une fonctionnalité particulière de CF, autant passer sur Betaflight…
Salut Seb, pour ce qui est de la traduction essaie google traduction, je t’assure il est vraiment top, de plus il arrive à comprendre le sens de la phrase, ça n’a rien a voir avec reverso
merci les gas 😉 mais du coup,quitte à tripoter mes 3 quadris ,je les ai tous passé sur Betaflight,et je regrette pas ,les pid d’origine sont franchement pas mal comme base,et on est pas perdu ,90% identique dans la mise en page ,la conversion à mis 3min part machine … nickel
Salut, je suis un noob, je découvre mon premier racer et du coup ton tuto me sert bien… Cependant quelques soucis, j’ai un eachine racer 130, le failsafe fonctionnait très bien en sortie d’usine, j’ai tenter de le brancher a CF afin de regler les modes de vol et l’armement via un switch. Sur tes conseils j’ai bien le dump d’usine, mais j’ai aussi écraser (comme conseillé) l’ancienne config lors du flash obligatoire de ce soft (sinon aucun accès !!)
bref, sur le nouveau logiciel, il n’y a pas d’onglet failsafe et du coup, mon multi ne s’arrete plus en cas de perte radio…. comment le régler de nouveau pour que cela fonctionne ?? si ce n’est pas le cas, je ne peux plus voler en tout sécurité donc au sol pour mon racer ><
Merci de ton aide ;p
Salut, pour que l’onglet Failsafe (et d’autres d’ailleurs) apparaissent dans Betaflight Configurator (ce n’était pas le cas sur d’anciennes versions) il faut cocher la case en haut à droite : « Enable Expert Mode » (à côté du bouton « Disconnect ») et là l’onglet failsafe apparaîtra 😉
Salut 🙂
j’ai suivie ton tuto j’ai tous configuré avec mon naze32 rev5 (moteur marche et radio RC aussi avec le logiciel) mais quand je debranche de l’ordi et je laisse que la battrie le drone decolle pas :/
salut
J’ai commandé une NAZE32 rev6 et je n’arrive pas a y installer le firmware =/.
J’ai essayer avec Cleanflight mais après avoir flasher j’ai un message d’erreur « STM32- timed out, programming: FAILED ».
Pourriez-vous m’éclairer sur ce que je dois faire pour régler ce problème ?
merci d’avance
Bonjour je commence un peut à devenir fou car j’ai regarder tout les commentaires depuis le premier jusqu’au dernier et aucun ne parle d’un problème pour connecter sa radiocommande ( frsky 9XD plus pour moi ) à Betaflight car quand j’ai mon Quad brancher sur l’ordinateur et connecté à betaflight sans problème ( avec une lipo ). J’allume ma radiocomande je vais ensuite dans l’onglet « reciver » et le bouge les manches mais rien ne se passe. Et je suis sur que ma radio et bind avec mon quad. Et mon branchement et en ppm donc j’ai changer quelques réglage sur betaflight mais peut être pas tout. En bref À L’AIDE.?
Bonjour,
peut on connecter une naze32 a betaflight sans effacer la carte?
merci
bonjour
vieux topic, mais toujours utile
pour une re-configuration d’un drone 250 où il a fallu faire une mise à jour du firmware …
du coup , j’ai chargé la dernière version : 2.3.2 , sur du nave32
la commande est une x9D+ (pour des infos : http://frskytaranis.forumactif.org/)
après le réglage basique, faudra que je tente la télémétrie (si le drone est toujours entier)
pour l’instant, il n’y a que le retour de la tension de la batterie RX, via un module FLVSS
grand merci
Nouvelle version par rapport a celle que j’ai connu, il y a quelques années…
Plus complète mais cependant, il me manque un détail en page 2 qui existait dans l’ancienne version, celui d’appairer un satellite Spektrum via le cli avec la fameuse ligne de commande :
Set spektrum_sat_bind=
Me manque aussi la procédure, comme ça fait un certain temps, je ne m’en rappel plus !!
Autrement, c’est juste parfait !
Merci pour l’aide.