
 pour radios FrSky Taranis (OpenTX 2.2)")
")






Bonjour,
Dans cet article, nous allons voir comment configurer une Naze32 sous Cleanflight ou Betaflight (les exemples de cet articles seront sous Betaflight), de la mise à jour de la carte, jusqu’à la mise en vol :). Cela risque d’être un peu long à décrire ici, mais rassurez-vous, une fois que vous aurez pris le coup de main, il faut une dizaine de minutes pour reconfigurer une Naze32 après la mise à jour d’une nouvelle version de firmware par exemple 😉
 1 – Mise à jour du firmware
1 – Mise à jour du firmware
J’ai déjà écrit un article sur le sujet (pour Betaflight) ou ici (pour Cleanflight), que je vous invite à aller consulter, mais depuis que je l’ai écrit, l’interface Chrome de Cleanflight a bien évolué, je vais donc refaire une passe rapide sur le sujet 🙂
Dans un premier temps, pour Betaflight, il faut aller récupérer le firmware correspondant à votre carte de vol (FC en anglais). Pour cela rendez-vous sur la page de Betaflight – Releases et téléchargez le .hex ou .bin correspondant à votre FC.
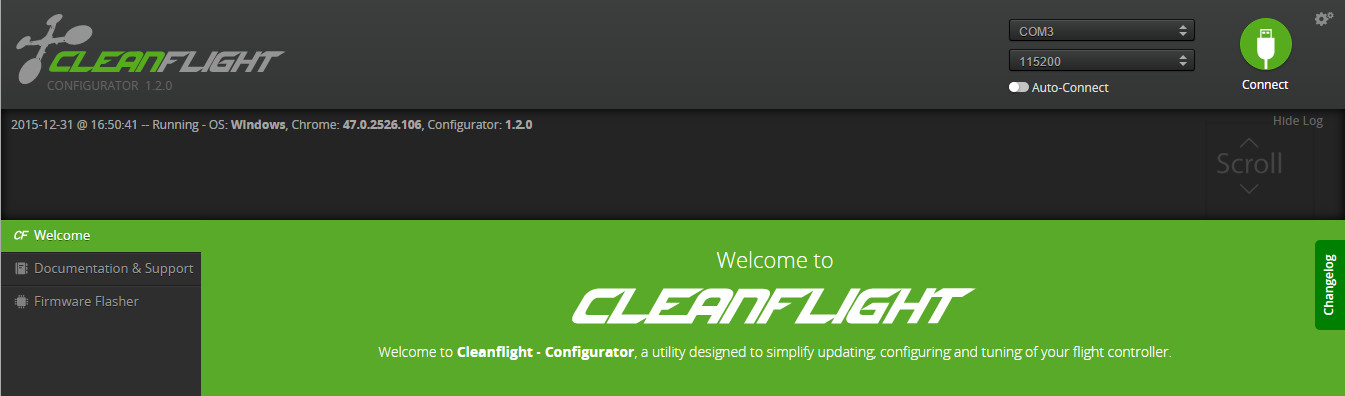
Lancez le configurateur Chrome pour Cleanflight (l’interface est commune avec Betaflight) et rendez-vous sur l’onglet « Firmware Flasher »
 Cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger. Assurez-vous que la case « Full chip erase » est bien cochée (verte), car vu les changements qui interviennent ces temps-ci entre chaque version, il est conseillé de repartir de zéro à chaque fois pour éviter tout soucis ! Et enfin, si vous flasher une SPRacingF3, cochez la case « Manual baud rate » et choisissez 256000 comme vitesse 😉
Cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger. Assurez-vous que la case « Full chip erase » est bien cochée (verte), car vu les changements qui interviennent ces temps-ci entre chaque version, il est conseillé de repartir de zéro à chaque fois pour éviter tout soucis ! Et enfin, si vous flasher une SPRacingF3, cochez la case « Manual baud rate » et choisissez 256000 comme vitesse 😉
 Cliquez ensuite sur « Flash Firmware« .
Cliquez ensuite sur « Flash Firmware« .
![]() Si par hasard vous avez un message d’erreur à ce moment (du genre « STM32 boot error » ou autre), ne touchez à RIEN, et appuyez une deuxième fois sur « Flash Firmware », cela suffit en général à relancer le flashage et la deuxième fois est souvent la bonne (plutôt que de tenter de tout reprendre à zéro ;))
Si par hasard vous avez un message d’erreur à ce moment (du genre « STM32 boot error » ou autre), ne touchez à RIEN, et appuyez une deuxième fois sur « Flash Firmware », cela suffit en général à relancer le flashage et la deuxième fois est souvent la bonne (plutôt que de tenter de tout reprendre à zéro ;))
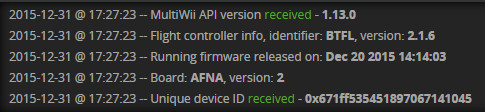
Si tout s’est bien passé, vous devriez vous cette ligne apparaître :
![]() Votre naze32 est maintenant flashée avec la dernière version de Betaflight ! Débranchez et rebranchez votre Naze32 et appuyez sur le bouton « Connect » dans le configurateur Chrome.
Votre naze32 est maintenant flashée avec la dernière version de Betaflight ! Débranchez et rebranchez votre Naze32 et appuyez sur le bouton « Connect » dans le configurateur Chrome.



Salut TiTidom 🙂
Une tuerie cet article !!!!!
Merci
salut
super tuto
il m’as bien aidé
merci
TRES bon article.
Clair et précis
Merci
Excellent article Olivier.
Bonne année!
Je viens de monter un QAV250 et si j’avais trouvé ça, j’aurais gagné du temps. Je garde cette référence sous le coude, ça peut être toujours utile.
Merci Daniel, et bonne année à toi aussi 🙂
(bien sur que je me souviens 😉 quand est-ce qu’on se fait une session de vol avec ton 250 ?)
Déjà il faut que je pratique un peu, et pour cela je cherche un spot plus ou moins calme.
Merci pour ce superbe article, il est parfait
Super travail.
J’ai redécouvert certaine fonction 🙂
Une seul question concerne le Failsafe…
Je pensais que c’était un truc quand on perdait le signal radio.
Pourquoi le mettre a 1100 ? ca ferait tomber le quadri ?
Y a t’il un moyen sur de le tester?
Pourquoi ne pas le mettre a 1400 pour que le quadri redescende doucement ?
Bonjour,
Merci 🙂
Concernant le failsafe, il y a deux écoles : ceux qui se disent que si le failsafe se déclenche, à choisir il vaut mieux qu’il coupe tout et que le quadri tombe hélices arrêtées (pour des petits quadri de courses type 250, dans tous les cas, cela ne le fera tomber que de 1 à 2m maxi, et il vaut mieux qu’en arrivant à terre les hélices ne tournent pas, au risque de tout cramer si une hélice se bloque dans la terre ou l’herbe par exemple :(), et ceux qui souhaitent que leur quadri se remette à plat, et descende doucement pour se poser… Sauf qu’on ne sait pas comment ni où il va descendre 🙁 et s’il descend de quelques mètres et que les hélices continuent à tourner pendant plusieurs secondes, qui dit que quelqu’un ne va pas le ramasser sur le terrain pour vous le ramener avec donc le risque de se prendre les doigts dans les hélices 😉
Personnellement, j’ai donc fait le choix de tout couper 🙂 nos zozios sont solides et résistent bien aux chutes… moins que nos doigts et notre visage 😉
Mais ce que vous proposez est tout à fait possible sous cleanflight et betaflight, il faut juste configurer le failsafe (les commandes CLI différemment)
Et pour tester, oui il y a un moyen sur : à la maison, quadri SANS les hélices, posé sur une table, on allume tout, on arme, on met les gaz à 1500 (mi-gaz) et on coupe la radio (pour simuler une perte radio), et là on regarde comment réagit le quadri (est ce qu’il réagit tout court ? est ce qu’il continue mi-gaz sans jamais s’arrêter ? Est-ce qu’il change de régime moteur ? est-ce que les moteurs se coupent bien ?) et s’il réagit correctement, c’est tout bon 😉
Bons vols,
Ok merci beaucoup pour ces précisions.
Je vais opter pour l’arrêt des moteurs 🙂
Je préfère le voir s’écraser que de blesser quelqu’un.
les deux solutions solutions ont pourtant des avantages et des inconvénient.
En tout cas en plus d’un travail tres complet, vous etes rapide et réactif et la réponse ne tient pas en 2 mots.
merci beaucoup.
Ps: J’avais activé le Failsafe uniquement dans l’onglet configuration je ne savais pas qu’il y avais un truc à faire coté CLI
Bonjour,
Super article !
Une petite question :
Plutôt que d’utiliser les trim/subtrim de la radio pour atteindre la plage 1000/2000, pourquoi ne pas utiliser la commande CLI rxrange ?
Ca me semble plus propre et plus sûr puisque c’est en « dur » dans le contrôleur de vol.
Bonsoir 🙂
Remarque très pertinente, c’est vrai que je ne l’ai pas évoqué dans ce tuto 🙂
Je n’utilise pas la commande rxrange, d’une part car (cf la documentation de cleanflight) elle est à utiliser « en dernier recours » si les réglages via la radio ne fonctionnent pas, et justement car je trouve cela moins « propre » (comme quoi il faut de tout pour faire un monde :)).
Je m’explique :
– la commande rxrange ne permet pas de régler le « neutre » (subtrim) donc dans tous les cas il faudra se pencher sur ce réglage via la radio.
– la commande rxrange « transforme » le signal venant de la radio pour tenter de le faire « correspondre » au mieux aux valeurs attendues. Pour ma part, je préfère faire en sorte que le signal d’entrée soit propre (avec les bonnes valeurs pour chaque voie), plutôt que de faire entrer un signal tout « bizarre » (au niveau des valeurs) et d’avoir à le convertir (enfin la carte pas moi, lol) ensuite. D’autant que cette « fonction » utilisera des ressources sur la Naze32, alors autant réserver cette ressource à la stabilisation de nos machines 🙂
On peut utiliser la commande rxrange dans le cas où, par exemple, la radio n’est pas ou peu programmable au niveau des voies (inversion, ou réglage des fins de courses)
Bons vols,
Quel travail, vraiment bravo, c’est un article exceptionnel !!!!
Je me permet de demander cette configuration de Cleanfly fonctionne sur un Naze32 rev6? J’ai lu qu’il y avait quelques soucis…
Merci
Bonsoir,
Merci 🙂
Cleanflight et Betaflight fonctionnent très bien sur une Naze32 rev6, la seule chose concernant les rev6, c’est le fait que sur les premières versions (il y en a 3 versions à ce jour : les rev6, rev6+ et rev6B de mémoire), le port USB alimente en 5V la partie sorties ESC, ce qui peut poser des soucis lors de la phase de calibration avec certains ESC (je l’ai vu par exemple sur des littlebee 20A). Dans certains cas, il faut débrancher le bec 5V pour que la calibration fonctionne 😉
Sur les Naze32 rev6B (dispo depuis en gros mi-décembre 2015), il n’y a plus ce soucis, car l’USB sur ces naze32 n’alimente plus la partie ESC.
Bons vols,
Tous les Becs de mes ESC sont déconnectés donc ça devrait aller pour moi…
Merci pour toutes ces infos
Encore bravo
LE tuto indispensable pour débuter avec cleanflight! Super article très précis et surtout très clair pour le néophyte que je suis!
Bravo et merci pour ce super boulot!
En effet super tuto clair et précis.
Petite question, j’ai désactivé par erreur sur le UART1 le port « MSP » et bien sûr je ne peux plus accéder à ma carte.
Y a t’il un moyen de récupérer ça?
Oups ! Sur quel carte et quelle version de firwmare ? car dans les dernières versions même en décochant la case MSP, ce n’est pas pris en compte et après un « save & reboot » le MSP reste actif sur le UART1…
Si toutefois il n’est plus possible d’accéder à la carte, on peut passer la carte en mode « bootloader » : il y a deux pad/connecteurs sur la carte avec écrit à côté « boot », en les mettant en contact et en connectant la carte au PC via USB tout en maintenant ce contact, la carte est à nouveau accessible en mode « bootloader » et peut être reflashée. (là c’est la version courte ;))
Bons vols,
C’est sur une naze32 full rév5.
J’ai repéré le boot à ponter sur la carte, j’essaie ça demain.
En tout cas merci pour la réponse aussi rapide. ;-))
J’ai fait la même boulette il y a quelques jours, et en suivant ces instructions j’ai réussi à la récupérer.
1 – Ouvrir Cleanflight et aller dans la page ‘Firmware Flasher’
2 – Sélectionner le firmware à flasher
3 – Cocher la case ‘No reboot sequence’
4 – Cocher la case ‘Flash on connect’ (cette option apparaît une fois le ‘No reboot sequence’ activé.
5 – Court-circuiter les pads du bootloader (ceux que tu as repéré) il faut le maintenir jusqu’à la fin de l’opération
6 – Brancher l’USB
7 – Une fois que tu vois le message qui indique que le flash est fini, tu peux retirer le court-circuit.
Bonne chance!
Parfait, tout fonctionne, plus qu’à tout re-paramétrer. C’est là que ce tuto va m’aider encore une fois.
Merci les gars!
bonjour, jai un soucis au niveaux du réglage ailleron trim sur futaba.
J’ai résolu mon problème,il fallait allé dans expo D/R et le mettre à 100%
salut , merci pour ce super tuto .
juste une question , je viens de recevoir mon hyperion vengeance 280 fpv qui viens juste de sortir pour la France .
je me demande juste si il faut faire tout ce qui est expliquer sur ton tuto , car d’usine ce n’ais pas tout regler ?
bon peut etre encore calibrer esc mais le reste c’est obligatoire ?
merci pour votre reponse
A+
Super article !
Merci beaucoup
Site superbe, bien expliqué car même un papy(67) s’en sort pour toutes les config nécessaires.
Chapeaux
@+
RV
hello.
merci pour cet article fort pratique et tres clair.
juste une note.
dans le CLi, je fais toujours save à la fin pour que les parametres soient bien sauvegardé dans la carte ?
ça n’est plus d’actualités dans les dernières versions ?
Bonjour 🙂
Tu as tout à fait raison de le rappeler, merci.
C’est toujours le cas en effet, et je viens de mettre un rappel dans le tuto (j’étais persuadé de l’avoir mis… oups) 😉
Bons vols,
merci pour ce super tuto Olivier, maintenant je n’ai plus d’excuse pour passer ma Naze32 de Baseflight à Betaflight 🙂
hello,
super tuto, ça aide bien .
il est écrit dans ce tuto d’une version de cleanflight 1.2.0, où la trouve t’on ? actuellement la dernière dispo que j’ai trouvé est la 1.1.0.
merci
Bonjour,
La version 1.2.0 est encore en cours de développement 😉 Elle peut être téléchargée directement à partir du github de Cleanflight en version « development » et installée à la main (à partir de l’archive .zip) sous Chrome.
Bonjour
très bon tuto, il m’a été utile pour mon premier multirotor.
merci
Salut
Pour info, Cleanflight 1.12 est maintenant dispo avec le Airmode ^^