
 pour radios FrSky Taranis (OpenTX 2.2)")
")






Bonjour,
Dans cet article, nous allons voir comment configurer une Naze32 sous Cleanflight ou Betaflight (les exemples de cet articles seront sous Betaflight), de la mise à jour de la carte, jusqu’à la mise en vol :). Cela risque d’être un peu long à décrire ici, mais rassurez-vous, une fois que vous aurez pris le coup de main, il faut une dizaine de minutes pour reconfigurer une Naze32 après la mise à jour d’une nouvelle version de firmware par exemple 😉
 1 – Mise à jour du firmware
1 – Mise à jour du firmware
J’ai déjà écrit un article sur le sujet (pour Betaflight) ou ici (pour Cleanflight), que je vous invite à aller consulter, mais depuis que je l’ai écrit, l’interface Chrome de Cleanflight a bien évolué, je vais donc refaire une passe rapide sur le sujet 🙂
Dans un premier temps, pour Betaflight, il faut aller récupérer le firmware correspondant à votre carte de vol (FC en anglais). Pour cela rendez-vous sur la page de Betaflight – Releases et téléchargez le .hex ou .bin correspondant à votre FC.
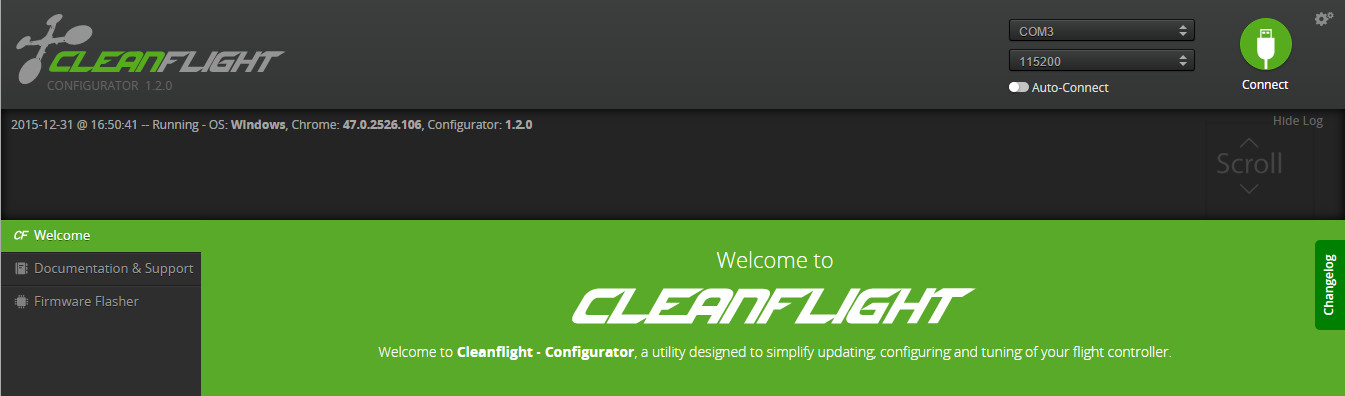
Lancez le configurateur Chrome pour Cleanflight (l’interface est commune avec Betaflight) et rendez-vous sur l’onglet « Firmware Flasher »
 Cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger. Assurez-vous que la case « Full chip erase » est bien cochée (verte), car vu les changements qui interviennent ces temps-ci entre chaque version, il est conseillé de repartir de zéro à chaque fois pour éviter tout soucis ! Et enfin, si vous flasher une SPRacingF3, cochez la case « Manual baud rate » et choisissez 256000 comme vitesse 😉
Cliquez sur « Load Firmware [Local] » et allez cherchez le fichier .hex (ou .bin) que vous venez de télécharger. Assurez-vous que la case « Full chip erase » est bien cochée (verte), car vu les changements qui interviennent ces temps-ci entre chaque version, il est conseillé de repartir de zéro à chaque fois pour éviter tout soucis ! Et enfin, si vous flasher une SPRacingF3, cochez la case « Manual baud rate » et choisissez 256000 comme vitesse 😉
 Cliquez ensuite sur « Flash Firmware« .
Cliquez ensuite sur « Flash Firmware« .
![]() Si par hasard vous avez un message d’erreur à ce moment (du genre « STM32 boot error » ou autre), ne touchez à RIEN, et appuyez une deuxième fois sur « Flash Firmware », cela suffit en général à relancer le flashage et la deuxième fois est souvent la bonne (plutôt que de tenter de tout reprendre à zéro ;))
Si par hasard vous avez un message d’erreur à ce moment (du genre « STM32 boot error » ou autre), ne touchez à RIEN, et appuyez une deuxième fois sur « Flash Firmware », cela suffit en général à relancer le flashage et la deuxième fois est souvent la bonne (plutôt que de tenter de tout reprendre à zéro ;))
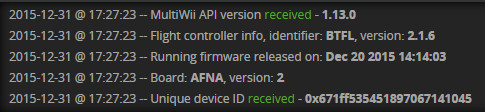
Si tout s’est bien passé, vous devriez vous cette ligne apparaître :
![]() Votre naze32 est maintenant flashée avec la dernière version de Betaflight ! Débranchez et rebranchez votre Naze32 et appuyez sur le bouton « Connect » dans le configurateur Chrome.
Votre naze32 est maintenant flashée avec la dernière version de Betaflight ! Débranchez et rebranchez votre Naze32 et appuyez sur le bouton « Connect » dans le configurateur Chrome.



Excellent tuto, très pédagogique, clair, etc…. gros boulot, bravo et respect. Merci pour ce partage.
Bonsoir,
Bravo et felicitations !
et surtout un grand merci !!!
Bonjour
Sais tu a quoi sert le RSSI (Signal Strength) dans l’onglet Configuration? Car je sais que le signal RSSI evalue la puissance de reception du signal radio mais je ne sais pas sur quoi intervient cette fonction sous Betaflight 2.5.2
De meme a quoi correspond le mode ACCRO PLUS ???
Bonsoir à tous ! Je cherche le moyen d’augmenter ma valeur d’inclinaison du pitch et roll, qui semble être bloqué à 20 ou 30°.
Merci à tous et non week-end !
Salut 🙂
Je pense que la commande que tu cherches c’est «max_angle_inclination», qui définit l’angle maxi d’inclinaison lorsque tu voles en mode angle notamment 😉
Pour le régler, il faut aller dans le CLI, et taper la commande : «set max_angle_inclination = 700» par exemple pour mettre 70°, ou une valeur de 500 pour 50° etc… (n’oublies pas de taper la commande «save» ensuite pour sauvegarder tes changements)
salut olivier,
Sais tu si la commande fonctionne sur le roll également ?
car j’ai l’impression que ca fonctionne uniquement sur le pitch. En revanche depuis que je teste des réglages je n’arrive toujours pas à régler le virage plein gaz car le racer fait presque un tonneau sur place … Une idée ?
Merci pour ces deux questions !
Cela vient probablement des réglages de tes PID (s’il ne tient pas dans les virages, probablement le I qui n’est pas assez haut) 😉
Bon je n’arrive à rien !
Le max angle est déjà à 700 et il se comporte pareil …
Quelqu’un aurait il un dump d’un eachine 250 ?
Merci et à très vite !!!
mon dump :
# version
# BetaFlight/CC3D_OPBL 2.4.1 Feb 19 2016 / 01:45:57 (fa39150)
# dump profile
# profile
profile 0
set yaw_p_limit = 500
set rc_rate = 100
set rc_expo = 35
set rc_yaw_expo = 0
set thr_mid = 25
set thr_expo = 0
set roll_rate = 20
set pitch_rate = 20
set yaw_rate = 10
set tpa_rate = 0
set tpa_breakpoint = 1500
set pid_delta_method = MEASUREMENT
set dterm_lpf_hz = 0.000
set dterm_average_count = 4
set pid_controller = LUX
set p_pitch = 16
set i_pitch = 10
set d_pitch = 10
set p_roll = 16
set i_roll = 10
set d_roll = 10
set p_yaw = 30
set i_yaw = 20
set d_yaw = 0
set p_pitchf = 1.300
set i_pitchf = 0.260
set d_pitchf = 0.151
set p_rollf = 1.300
set i_rollf = 0.260
set d_rollf = 0.151
set p_yawf = 4.200
set i_yawf = 0.400
set d_yawf = 0.010
set level_horizon = 3.000
set level_angle = 9.000
set sensitivity_horizon = 75
set p_alt = 50
set i_alt = 0
set d_alt = 0
set p_level = 30
set i_level = 30
set d_level = 100
set p_vel = 120
set i_vel = 45
set d_vel = 1
set acro_plus_factor = 30
set acro_plus_offset = 40
Perso, je n’ai jamais touché à ce paramètre (valeur par défaut à 70, quand je volais encore en ANGLE) et quand tu pousses le manche il s’incline bien (comment détermines-tu qu’il ne s’incline qu’à 20° ?). Par contre cela peut venir de tes PID (encore et toujours ce fichus PID ;)) s’ils ne sont pas bien réglés, cela peut t’empêcher de faire certaines manœuvres (inclinaison, mais aussi revenir à plat tout seul alors que tu ne lui as rien demandé, etc…)
Merci Olivier ! Je test ça dès lundi !
Salut Olivier,
Peu être pourra tu m’aider…
Je suis sous betaflight 2.5.3 sur une CC3D brancher en PPM à un recépteur Spektrum et je n’arrive pas à faire fonctionner le failsafe.
J’ai beau essayer divers réglage via le nouvel onglet de cleanflight, rien y fait.
Une idée?
Merci.
Bonjour Sylvain,
Quel est le symptôme ? (lorsque tu dis que cela ne fonctionne pas) C’est vrai que depuis quelques versions, l’écran failsafe a bien changé 🙂 Perso, j’ai un inter qui (dans les modes de vol) me permet d’activer le Failsafe, et dans l’écran failsafe, j’active le « stage 2 » et je suis en scénario « Drop » pour qu’il coupe tout dès l’activation du FS.
Bonjour olivier,
Merci pour ta réponse, en faite le Failsafe ne s’active pas lorsque que j’éteins ma radio pour simuler une perte de signal. Par contre l’inter configuré pour le Failsafe lui marche bien.
Une idée d’où pourrai venir le problème?
Si cela ne fonctionne pas lors de l’extinction de la radio, c’est le failsafe du récepteur qui ne doit pas être réglé. Tu as quel récepteur radio ? peux tu le régler pour qu’il n’envoie aucun signal en cas de coupure radio, ou bien sinon lui faire prendre une position des manches et inter spécifiques ?
En faite je me suis mal expliquer :
Le Failsafe de mon récepteur marche très bien. J’éteint ma radio, le drone tombe.
Ce que j’aurai voulu, c’est qu’il atterrisse en douceur.
Sauf que via le récepteur (un spektrum S603) ce n’est pas possible. Je peux bien sur configurer le Failsafe avec les gaz au mini pour qu’il atterrisse mais une fois au sol les hélices continue de tournée et c’est la cata…
Je voulait donc utilisé l’option « Land » en « Stage 2 » de Cleanflight, sauf que ça ne marche pas, il tombe systématiquement.
Après peu être que le résultat aurait été le même. C’est à dire que même avec Cleanflight, peu être qu’une fois arrivé au sol les hélices continu de tourner?
bonsoir, je suis sur une Naze32 10dof, firmware betablight 2.5.3.
tous est configurer comme dans le Tuto mais impossible d’armée mes moteurs ou de réponse a n’importe quel fonction de la télécommande. Si je repasse en baseflight tout est Ok.
Je ne comprend pas de ou ça peux venir.
Merci
Bonjour Eric, tu es dans quel mode ? PPM ? PWM ? SBUS ? cette partie là est bien configurée ?
salut jolie tuto avec le failsave peut on ajuster ou autre pour descende doucement pour se poser , quand on pert le signal?merci .ET POUR LE SONAR DOIT ON ACTIVER LE SONAR AVEC BARO OU SONAR SEUL ? MERCI
Bonjour robin,
Merci 😉 Oui c’est possible en configurant le failsafe pour qu’il se mette à une position des gaz donnée (il faut la régler pour qu’elle corresponde à la position du manche qui fait descendre le quadri doucement), mais par contre il ne sait pas combien de temps descendre (car il ne connait pas la hauteur) il faut donc lui indiquer combien de temps il doit descendre, et ensuite il coupera les gaz automatiquement…
Pour le sonar, c’est au choix, mais oui en général on active les deux de concert tant qu’à faire (après est-ce que c’est précis et fiable, c’est une autre histoire ;))
JE NE SAIS VRAIMENT PAS COMMENT ACTIVER LE FAILSAVE POUR QU;IL SE POSE DOUCEMENT ,J’AIMERAIS AVOIR PLUS DE DETAILS ? MERCI A TOI
Bonjour Robin,
Cela fera l’objet d’un Tuto à part entière, ce serait un peu trop long à expliquer ici 😉 Pour te mettre sur la piste malgré tout, cela se passe dans l’onglet Failsafe avec l’option « Landing » activée.
salut
super tuto
il m’as bien aidé
merci
Bonjour,
Merci beaucoup pour ce superbe « Tuto ».
En comparant la valeur » set failsafe_throttle_low_delay = » de ce tuto et la même valeur pour le tuto « https://blog-rc.tidom.net/cleanflight-betaflight-commandes-cli/ », les valeurs ne sont pas les mêmes.
J’utilise un récepteur XSR FRSKY en mode SBUS.
Est-ce que la différence est dû à ce type de mode ?
Ce tuto : valeur = set failsafe_throttle_low_delay = 10
Tuto https://blog-rc.tidom.net/cleanflight-betaflight-commandes-cli/ : valeur = 100.
Merci pour les explications de ce blog.
Bonjour Gilles (désolé j’avais raté ton commentaire lol),
Cette valeur peut être adaptée suivant son besoin, et sa valeur « par défaut » a changé au fil des versions (notamment lors du passage à CF 1.12 où le Failsafe a été revu en profondeur) 😉 En gros, cette variable sert à NE PAS déclencher le failsafe SI tu n’as pas encore décollé (en d’autres termes, si la valeur est à X, le code vérifie que ton manche des gaz est à sa valeur minimum depuis X secondes, si tel est le cas, il n’enclenche pas la procédure de failsafe, car il considère que tu es au sol depuis ce temps là).
Ca, c’est du tuto !
Merci Olivier pour ce décryptage de CF.
Le seul problème de réglage pour mon QAV210 (Naze, One shot) c’est que les moteurs se coupent en vol lorsque mes gaz sont a 0 ; Le multi tombe comme une pierre… Faut le rattraper en catastrophe avant le crash
Min throttle 1150 (4 moteurs tournent à 1060)
Min command 1000
Tu as une idée ? Merci bcp
Bonjour Patrice,
Dans ta confiuration, si l’option MOTOR_STOP, disponible dans l’onglet configuration est active, CF & Betaflight coupent les moteurs lorsque ton manche des gaz est au minimum. C’est « normal ». Si tu ne veux pas que cela arrive, il te faut désactiver l’option MOTOR_STOP, mais attention dans ce cas, dès que tu vas armer, les moteurs vont se mettre à tourner au régime minimum (attention aux doigts ;)).
salut olivier.
moi jai l’option « motor stop » désactivé et le quad chut toujours quand les gaz sont a zéro…a tu une idée. merci
c’est normal car autrement quand tu armerais ton quad il décollerai aussitôt ! C’est juste un filet de gaz qui permet de faire tourner les hélices pour indiquer qu’il est armé mais pas de le faire voler
le problème ces en vol.je fait une monter vertical rapide et si je coupe les gaz a zéro les moteur se coupe et le quad tombe, sans pouvoir remettre les gaz.
comme tu as désactivé « motor stop » regarde du coté du Minimum Throttle si tes hélices ne tournent pas gaz à zéro
les moteurs tournent bien gaz a zéro avant de décoller.
j’ai fait un teste avec « motor stop » activé et sa fait pareille en vol…le quad chute comme une pierre…
erf je ne pourrais pas t’aider, sur le mien j’ai activé « motor stop » (l’Air Mode est sur un Inter) pour ne pas nicker d’hélices quand je me pose et aucun soucis en l’air je peux couper et remettre les gaz sans l’Air Mode d’activé
ok merci de ton aide moloko ces cool.
si quelqu’un peut m’aider pour résoudre mon problème?merci a vous
Bonsoir mackios,
Quelles sont tes valeurs de min_throttle ? min_command et min_check et à quelle valeur tes 4 moteurs tournent-ils correctement et ensemble (quand tu testes dans l’onglet moteur – sans hélice bien sur !) ?
D’autre part, même si le motor_stop est désactivé, il faut que l’AIR Mode lui soit actif pour que la stab fonctionne lorsque les gaz sont à 0 sinon il tombe 😉
bonsoir olivier.
min_throttle 1090
min_command 1000
min_check ????JE VOIS PAS OU CES.
il tourne tous ensemble a 1038 .MERCI A TOI
et le air mode est compatible avec horizon, angle et baro???je peux mettre la barre vert sur toute la plage?
Merci Mrs pour ce tuto il m’a appris beaucoup et m’apprends encore lol !
je me tate meme à essayer une nzae32 sous betaflight sur un de mes hélicos
Merci encore pour vos tuto clair et explicite pour les néophites que nous sommes !
salut Olivier quand j’active horizon mon quad va super bien mais si je met a la place angle il secoue ?que se passe t’il ? merci
Bonsoir, de ce que tu décris, cela vient probablement du gain de stabilisation en Angle qui doit pas être bon (trop haut si cela secoue). Tu peux le régler dans l’onglet « PID Tuning », en modifiant la ligne LEVEL : la première valeur (P / Strength (Angle)), c’est la valeur de stab en angle, tu peux la baisser 😉 Pour info, la 2ème colonne (I / Strength (Horizon)) c’est la valeur de stab en mode horizon.
quand je met horizon c’est le P = ROLL ET PITCH , MAIS ANGLE C’EST LEVEL ? C’EST BIEN CA ? ET AUTRE CHOSE POUR LE GPS IL GARDE ASSEZ SA POSITION MAIS POUR LE RETOUR MAISON IL S’EN VA TROP VERS LA DROITE ? QUE DOIS-JE AJUSTER POUR CA MERCI ENCORE ?
Pas tout à fait 😛 en ANGLE, c’est « LEVEL P » qui est pris en compte, en HORIZON, c’est « LEVEL I ».
Pour la partie GPS, je ne pourrai pas trop t’aider, car cela fait longtemps que je n’y ait pas touché 😉
resalut ,le mode stable est il plus stable que le mode horizon ? merci
excuse le mode level est il plus stable que le mode horizon
Je pense que tu voulais parler du mode ANGLE 😉 Les modes ANGLE et HORIZON sont différents dans leur utilisation… En ANGLE tu es limité dans l’inclinaison de ton multi (en clair, tu ne peux pas faire de figure avec, type tonneaux ou flips), quand tu pousses le stick à fond, il s’incline à l’angle maximum (70° de mémoire par défaut) mais n’ira pas plus loin… Alors qu’en Horizon si tu pousses le stick à fond, il va faire un tonneaux ou un flip, et dès que tu relâches il se stabilise tout seul. Il faut voir le mode Horizon comme une étape intermédiaire entre le mode ANGLE et le mode ACRO 😉
Bonjour Olivier.
Merci pour ce tuto car mon racer vole grâce à lui.
Par contre je suis embêté : je ne trouve pas gtune dans modes.
Jai cleanflight en 1.2.1.
Pourrais tu m’aider stp.
Merci
Bonjour, content de voir que cela vole 🙂 Pour ce qui est de GTune, il a été retiré des dernières versions de Cleanflight et Betaflight… Pour son caractère hasardeux à l’utilisation… 😉
Ah ok, merci
ben je pouvais toujours chercher alors.
En mode angle le drone oscille et se retourne, jai une valeur de 5 dans cleanflight.
Je partais du principe que cêtais trop élever et je pensais le redescendre à 2 pour commencer ?
C’est une bonne intuition de descendre à 2 🙂
L’idéal étant de régler le quadri en mode acro, car si les PID en eux mêmes ne sont pas bons, on aura beau baisser la stab, cela n’empêchera pas au quadri de se retrouner 😛
Régler les pids en accro: ok j’essayerais
je pense que du coup je me suis emmêler les pinceaux dans ma réflexion.
Est ce que t’aurais un principe de réglage à me donner, ou une façon de faire.
Merci en tous cas.
salut Olivier j’ai cette flip32 deluxe a connecter sur un recepteur s’il vous plais peux tu me dire ou m’expliquer ou m’envoyer un lien pour connecter sur un receveur pour moi celle ci est nouvelle je ne sais vraiment pas comment ? merci
http://www.rcdude.com/product-p/flip32-deluxe.htm
Super tuto, et toujours d’actualité avec la version 2.7.1. Un grand merci 🙂
En revanche j’ai une question concernant le réglage dans l’onglet Modes, mes interrupteurs sont inversés par rapport à votre explication. Ce n’est pas particulièrement gênant mais j’aime bien comprendre pourquoi 😉 Quelqu’un peut il me venir en aide ? Merci d’avance
salut à tous
j’ai un petit souci en mode ANGLE et HORIZON mes moteurs s’enclenche a font d’un seul coup et en mode ACCRO c’est nickel il vol très bien. la pousser des gaz se fait progressivement mais les moteur s’enclenche a font et ne veulent par redescendre ( je suis obligé de repasser en mode accro)…
quelqu’un peu il m’aidé car la je suis pommé merci a vous